Cognitively and Empathically Intelligent Collaborating Robots (KEIKO)
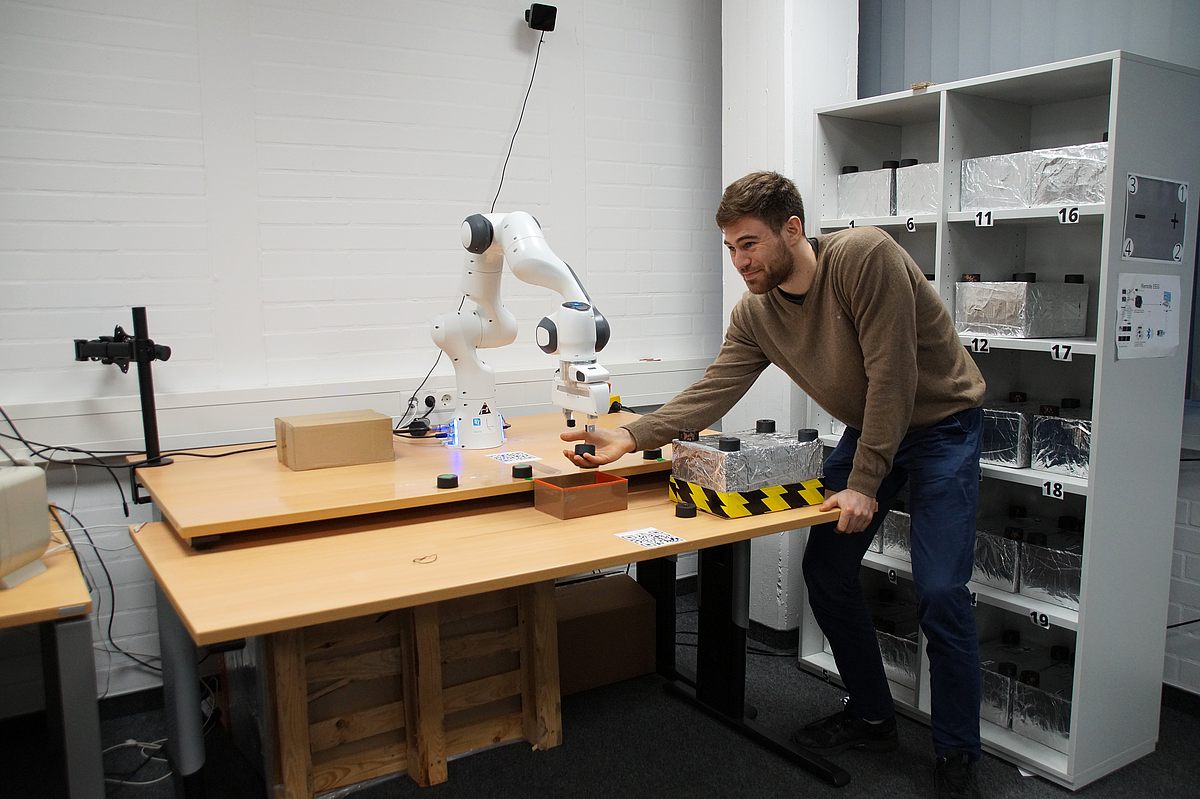
Today, collaborating robots (cobots) can safely perform repetitive and well-defined tasks with high speed and accuracy. Humans, on the other hand, are characterized by a higher degree of flexibility and improvisational ability, by social intelligence and comprehensive cognitive abilities - qualities that are not currently found in cobots.
On the one hand, a combination of these different and complementary strengths promises considerable potential for use in key application areas such as industrial manufacturing, healthcare and nursing, and assistance systems for plants and vehicles. On the other hand, this very combination requires an extremely high degree of sociocognitive and emotional intelligence in robots; without this, flexible cooperation in complex environments and with changing human partners is impossible. In this context, empathic intelligence is understood as the fundamental ability to understand the partner's mental states and intentions for action and to react adaptively to them in a context-related manner.
Publications
- N. Rohweder, R. Sando, C. Rembe: Low-cost face tracking using ONVIF-based surveillance cameras, 2025 Applications of Digital Image Processing XLVIII. SPIE, https://doi.org/10.1117/12.3064712
- N. Rohweder, C. Rembe: Pupillary spectra for use in optical electroencephalography, 2025 Applied Optical Metrology VI. SPIE, https://doi.org/10.1117/12.3064520
- S. Hossain, J. P. Müller: Exploring Empathic Human-Robot Collaboration, 2025 11th International Conference on Control, Automation and Robotics (ICCAR), Kyoto, Japan, 2025, pp. 346-355, https://doi.org/10.1109/ICCAR64901.2025.11073061
- H. Sarvghadi, A. Reinhardt, E.A. Semmelhack: A survey of wearable devices to capture human factors for human-robot collaboration. Pervasive and Mobile Computing, Volume 110, 2025. https://doi.org/10.1016/j.pmcj.2025.102048
- N. Rohweder, L. Raimund, Ch. Rembe: Influence of lossy JPEG compression on measurement uncertainty for luminance-based area measurements. tm - Technisches Messen. 2024;91(s1): 38-43. https://doi.org/10.1515/teme-2024-0049
- N. Rohweder Ch. Rembe: High precision pupillometry: Hochpräzise Pupillometrie. tm - Technisches Messen. 2023;90(s1): 114-119. https://doi.org/10.1515/teme-2023-0082
- E. Guerra, B. Kurz, J. Bräucker: An Extension to the Keystroke-Level Model for Extended Reality Interactions. Mensch und Computer – Workshopband. Darmstadt; 2022. https://doi.org/10.18420/muc2022-mci-src-443
- N. Rohweder, J. Gertheiss, Ch. Rembe: Sub-micron pupillometry for optical EEG measurements. tm - Technisches Messen. 2021;88(7-8): 473-480. https://doi.org/10.1515/teme-2021-0030
- N. Rohweder, Ch. Rembe, J. Gertheiss: Towards a remote EEGfor use in robotic sensors. In: Heizmann M, Längle T, editors. Forum Bildverarbeitung 2020. Karlsruhe: KIT Scientific Publishing; 2020. DOI: https://doi.org/10.58895/ksp/1000124383-18
- N.-O. Rohweder, L.A. Raimund, Ch. Rembe: Edge width and edge gradient: Influence on accuracy when measuring areas in lossily compressed images, tm - Technisches Messen, vol. 92, no. 5, 2025, pp. 190-199. https://doi.org/10.1515/teme-2025-0019
- S. Hossain1, F.T. Johora, J.P. Müller, S. Hartmann, A. Reinhardt: SFMGNet: A Physics-Based Neural Network To Predict Pedestrian Trajectories. AAAI 2022 Spring Symposium on Machine Learning and Knowledge Engineering for Hybrid Intelligence, 2022.

Further achievements
SWZ scientist Niels Rohweder presents the KEIKO project as part of an invited lecture at the Optics + Photonics Conference 2025 in San Diego.
See also SWZ press release "KEIKO at SPIE Optics + Photonics Conference".
KEIKO news coverage
- 2023-04-20 medizin&technik: "Wenn der Pflegeroboter Gefühle erkennt"
- 2023-03-06 taz: "Wenn der Roboter den Menschen missversteht"
- 2023-01-27 TU Clausthal press release: "Empathische Zusammenarbeit von Mensch und Maschine"
- 2024-07-08 iQ-Journal: "Von Star Trek zur Wirklichkeit - Wie die TU Clausthal Roboter empathisch machen will"
- 20240-10 ti-Magazin: "Kollaborierende Roboter entwickeln Empathie"
- 2025-06-23 SWZ press release: "Empathischer Roboter auf dem TU Clausthal Festakt"
- 2025-09-08 SWZ press release: "KEIKO at SPIE Optics + Photonics Conference"